
With the increasing global focus on carbon neutrality, solar energy has emerged as a critical component of renewable energy systems. Maximum Power Point Tracking (MPPT) technology plays a pivotal role in optimizing photovoltaic (PV) system efficiency. However, traditional MPPT algorithms often struggle with partial shading conditions, where the power-voltage (P-U) curve exhibits multiple peaks. This paper proposes a Multi-strategy Beluga Whale Optimization (MBWO) algorithm to address these challenges, enhancing tracking speed and accuracy under complex environmental conditions.
1. Photovoltaic System Modeling and Characteristics
The output characteristics of PV cells under varying irradiance and temperature conditions are modeled using the single-diode equivalent circuit. The current-voltage relationship is expressed as:
$$
I = I_{\text{ph}} – I_{\text{d}} \left[ \exp\left(\frac{q(V + IR_s)}{n k T}\right) – 1 \right] – \frac{V + IR_s}{R_{\text{sh}}}
$$
where \(I_{\text{ph}}\) is the photocurrent, \(I_{\text{d}}\) is the diode saturation current, \(R_s\) and \(R_{\text{sh}}\) represent series and shunt resistances, and \(n\) is the ideality factor. Under partial shading, the P-U curve exhibits multiple peaks, as demonstrated in Table 1.
| Pattern | S1 (W/m²) | S2 (W/m²) | S3 (W/m²) | S4 (W/m²) | MPP (W) |
|---|---|---|---|---|---|
| Uniform | 1000 | 1000 | 1000 | 1000 | 852.6 |
| Partial Shading 1 | 1000 | 1000 | 800 | 400 | 551.8 |
| Partial Shading 2 | 1000 | 800 | 600 | 400 | 412.6 |
2. Enhanced Beluga Whale Optimization Algorithm
2.1 Original BWO Framework
The Beluga Whale Optimization (BWO) algorithm mimics whale swimming, foraging, and falling behaviors. Key equations include:
- Balance factor: $$ B_f = B_0 \left(1 – \frac{t}{2T_{\text{max}}}\right) $$
- Position update in exploration:
$$
X_{i,j}^{t+1} = \begin{cases}
X_{i,p}^t + (X_{r,p}^t – X_{i,p}^t) \sin(2\pi r_2), & \text{if } j \text{ even} \\
X_{i,p}^t + (X_{r,p}^t – X_{i,p}^t) \cos(2\pi r_2), & \text{if } j \text{ odd}
\end{cases}
$$ - Whale fall probability: $$ W_f = 0.1 – 0.05 \frac{t}{T_{\text{max}}} $$
2.2 MBWO Enhancements
The proposed MBWO integrates four strategies to improve MPPT performance:
- Logistic Chaotic Initialization: Enhances population diversity using:
$$ r_{i,j+1} = 4r_{i,j}(1 – r_{i,j}) $$
$$ X_{i,j} = \text{Lb} + r_{i,j}(\text{Ub} – \text{Lb}) $$ - Nonlinear Balance Factor: Accelerates global-to-local transition:
$$ B_f = 0.1 \exp\left(-\frac{2t}{T_{\text{max}}}\right) + B_0 r_1 $$ - Cauchy Mutation: Escapes local optima via:
$$ X_{\text{best}}^{t+1} = X_{\text{best}}^t + 0.1 \cdot X_{\text{best}}^t \cdot \text{Cauchy}(0,1) $$ - Adaptive Weighting: Adjusts search granularity:
$$ \omega = \omega_i + (\omega_f – \omega_i) \exp\left(-2\left(\frac{t}{T_{\text{max}}}\right)^2\right) $$
$$ X_{i}^{t+1} = \omega \left( r_3 X_{\text{best}}^t – r_4 X_i^t \right) + C_1 L_F (X_r^t – X_i^t) $$
3. Simulation and Results
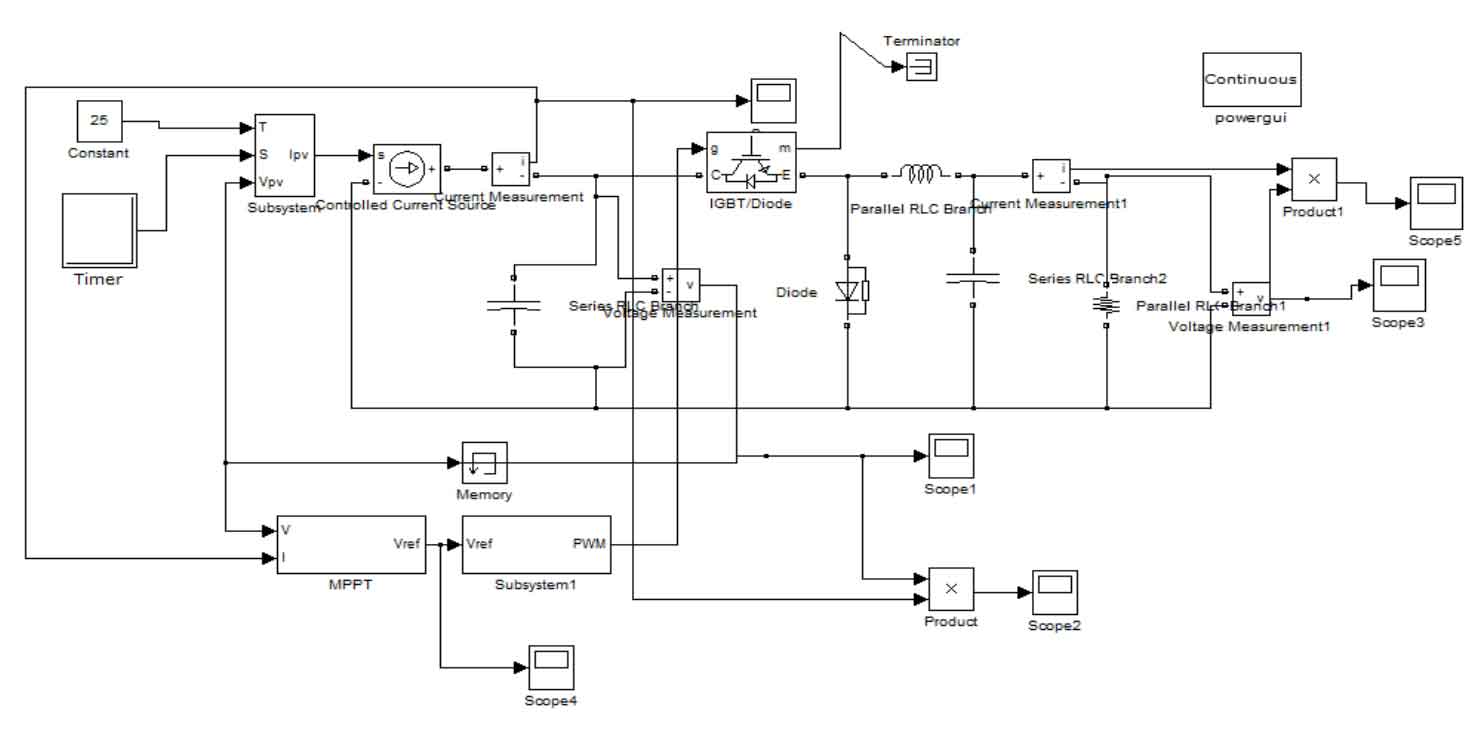
The MPPT control system was simulated in MATLAB/Simulink with a 213.15W PV array and Boost converter (\(C_{\text{pv}} = 1500\mu F\), \(L = 2mH\)). MBWO demonstrated superior performance:
| Algorithm | Tracking Time (s) | Power Accuracy (%) | Overshoot (%) |
|---|---|---|---|
| PSO | 0.26 | 98.2 | 4.3 |
| BWO | 0.18 | 99.1 | 2.1 |
| MBWO | 0.07 | 99.9 | 0.5 |
Under dynamic shading (irradiance shift from 1000/800/600/400 W/m² to 800/600/400/200 W/m² at t=1s), MBWO achieved 99.7% accuracy within 0.10s, outperforming BWO by 51% in convergence speed.
4. Conclusion
The MBWO algorithm effectively addresses MPPT challenges in partial shading environments through chaotic initialization, nonlinear balance factors, Cauchy mutation, and adaptive weighting. Experimental results validate its superior tracking speed (0.07s vs. 0.18s for BWO) and precision (99.9% vs. 99.1%). This advancement significantly contributes to PV system efficiency under the “dual-carbon” strategic framework.