
The control methods for the working points of solar photovoltaic arrays mainly include constant voltage control (CVT) method and MPPT method. CVT is a method of determining the power point of a system by stabilizing the terminal voltage of a solar photovoltaic array to a certain value. The most prominent advantage of constant voltage control is its simple control and good system stability. However, its shortcomings are manifested when the temperature changes significantly, that is, the working point in the CVT array cannot follow the maximum power point well. The working principle of MPPT is to find and track the maximum power output point of the array by changing the working state of the system in real time. This method can autonomously optimize with changes in system operation, but it is not as stable as CVT. The commonly used methods include “uphill” method, interference observation method, and conductivity increment method. At present, research on MPPT mainly focuses on the implementation of simple and stable control algorithms, such as optimal gradient method, fuzzy logic control method, and neural network control method, all of which have achieved significant tracking control effects.
The purpose of maximum power point tracking is to provide the maximum DC power generated by photovoltaic modules to the load as much as possible, so as to maximize the energy utilization efficiency of the system. However, as a practical application system, it is very difficult to achieve maximum power output by adjusting the load impedance in real-time.
In practical systems, the output power of solar cells can be obtained by detecting their current output voltage and current values, and comparing them with the last latest stored array power value. The smaller value is discarded to retain the larger value, and then the detection and comparison are carried out. This cycle of work can make the operating point of the array near the maximum power point M.
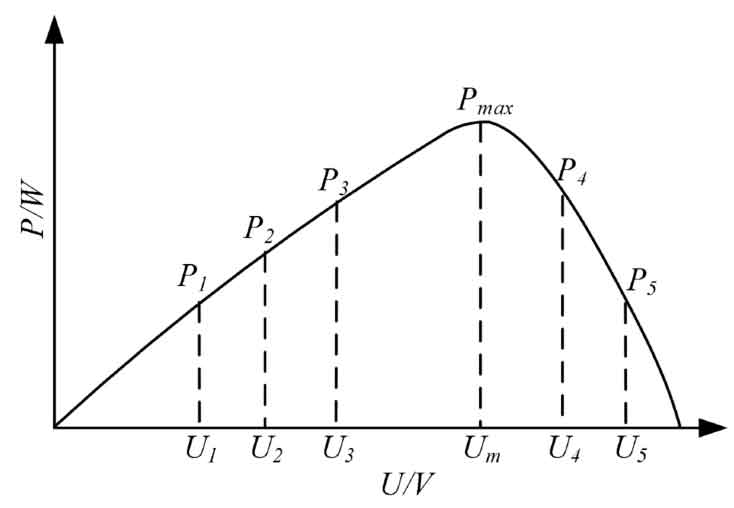
In fact, the implementation of MPPT can essentially be seen as a dynamic optimization process. It is easy to see this dynamic optimization process from the output power curve of the solar cell shown in Figure 1. When the load characteristics and the characteristics of the solar cell array determine that the voltage at its operating point is to the left of the voltage Um corresponding to the maximum power point of the array, the MPPT control function increases the operating voltage of the solar cell through a control algorithm. When the voltage at the working point is to the right of the voltage Um at the maximum power point of the array, the control function of MPPT is to achieve a decrease in the working voltage of the solar cell to near Um through corresponding control algorithms.
The intensity of sunlight and temperature largely determine the size of the short-circuit current and open circuit voltage of the solar cell array, and the efficiency of the system is directly affected by the size of the short-circuit current and open circuit voltage. If they are not coordinated properly, it will inevitably lead to a decrease in system efficiency. Therefore, in order to achieve maximum power output of photovoltaic arrays under any sunlight conditions, it is necessary to control the solar cell array accordingly.
Disturbance observation method, also known as mountain climbing method, refers to the method of perturbing the output voltage of a photovoltaic array and calculating the output power of the photovoltaic array before and after disturbance based on P=UI, comparing the two output powers before and after disturbance. If it is found that the output power of the photovoltaic array has increased after disturbance, it means that this disturbance has played a certain role in increasing the output power of the photovoltaic array, and the next disturbance will continue to disturb the output voltage of the photovoltaic array in the same direction; On the contrary, if the output power of the photovoltaic array decreases after disturbance, it indicates that the disturbance direction is not conducive to improving the output power of the photovoltaic array. Therefore, the next disturbance will be in the opposite direction. Based on the above analysis, it can be concluded that the advantages of disturbance observation method are: modular control loops are easy to implement; The tracking algorithm is not complex and is not difficult to implement in real systems; The precision requirement for the sensor is not high, so the disturbance observation method is chosen for this device.
There are many factors to consider when adopting an MPPT control method, including the advantages and disadvantages of various methods, and selecting the optimal algorithm based on the actual topology and load characteristics of the photovoltaic system. This system adopts disturbance observation method as the maximum power tracking control method for solar panels. In order to avoid increasing the complexity of control and improve the accuracy of control at all levels, MPPT control is placed in the front stage transformation, while other control requirements are implemented in the back stage transformation.
In the front-end Boost circuit, two main functions are completed: first, boosting, that is, raising the low voltage output of the solar cell to around 400V; The second is maximum power point tracking control, which directly adjusts the output voltage of the solar cell to operate near the maximum operating point.
The schematic diagram of the system structure for controlling a two-stage solar inverter is shown in Figure 2.
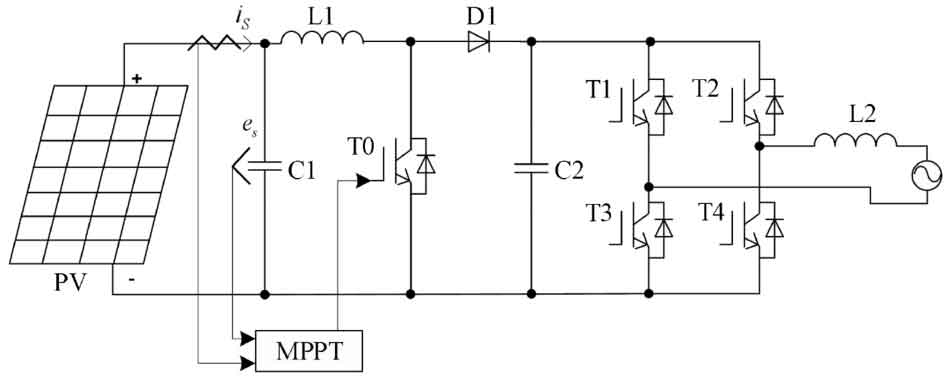
As shown in Figure 2, the main task of the DC-DC control part is to track the maximum power point. The DC-AC control part mainly completes the control of unit power factor output sine current.