
Abstract
This paper presents a comprehensive study on maximum power point tracking (MPPT) strategies for solar solar systems, focusing specifically on the Auto-Coupling Proportional-Integral (ACPI) control approach. The existing MPPT methods suffer from issues such as slow response, significant chatter, and low steady-state accuracy under varying environmental conditions. To address these challenges, the proposed ACPI-based MPPT strategy integrates advanced control algorithms to improve the performance of solar systems. This work analyzes the theoretical foundations of ACPI control, its implementation in solar systems, and its comparative performance against conventional MPPT methods. Furthermore, simulation results are presented to validate the effectiveness and robustness of the proposed approach.
1. Introduction
Solar energy, as a clean and sustainable source of power, has gained significant attention in recent years due to its potential to mitigate the impact of fossil fuel-based energy systems on the environment. solar systems convert solar radiation directly into electrical energy, and their efficiency critically depends on operating at the maximum power point (MPP). However, due to the variability of solar irradiance and ambient temperature, the MPP continuously shifts, necessitating the implementation of efficient MPPT algorithms.
Traditional MPPT methods, such as Perturb and Observe (P&O) and Incremental Conductance (INC), suffer from drawbacks like slow response times, significant oscillations around the MPP, and reduced accuracy under rapidly changing environmental conditions. This paper aims to overcome these limitations by introducing an MPPT strategy based on Auto-Coupling Proportional-Integral-Derivative (ACPI) control.
2. Solar System Modeling
2.1 System Overview
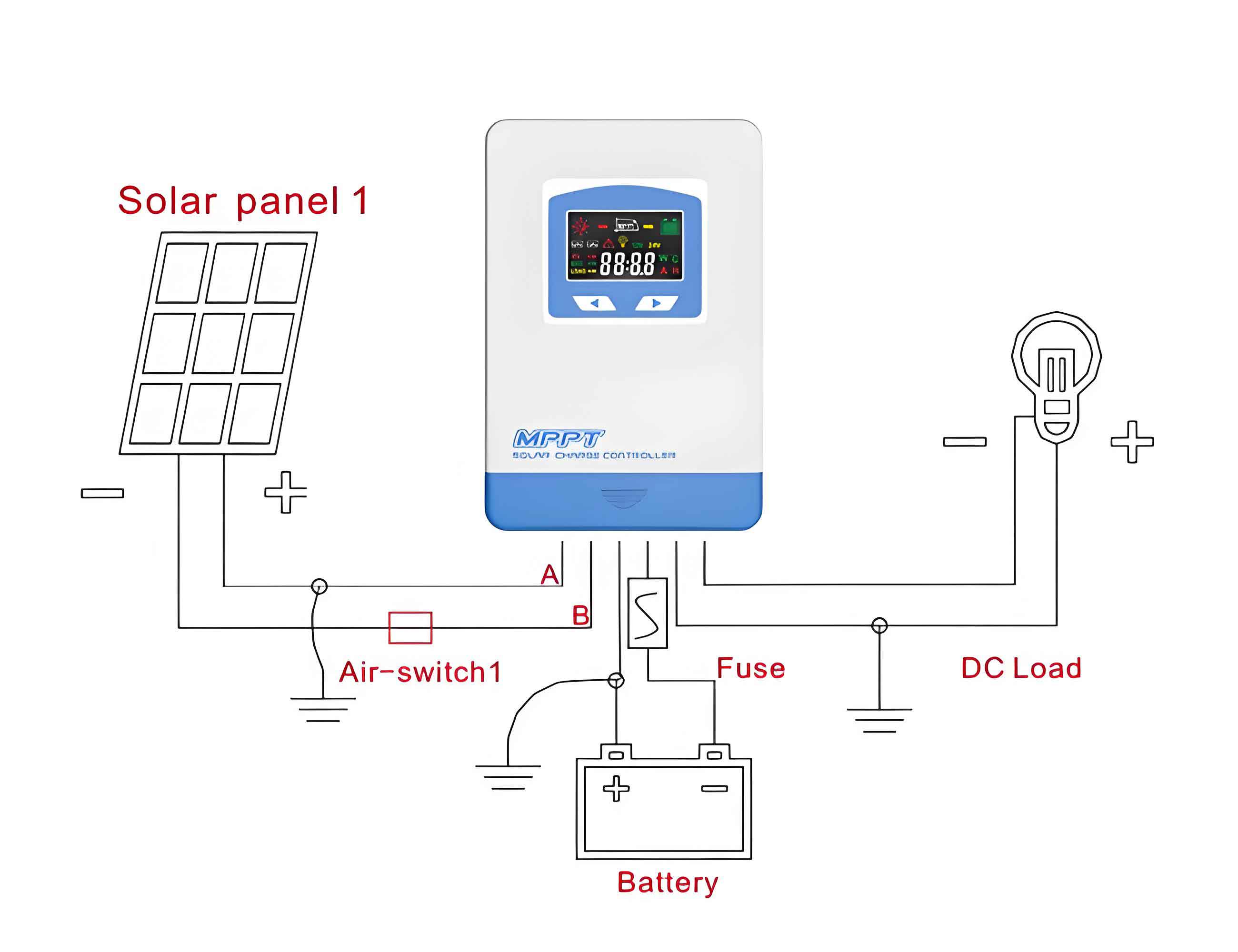
A typical solar system consists of solar panels, a DC-DC converter, a MPPT controller, and a load. The primary function of the MPPT controller is to adjust the operating point of the PV array to maximize its power output by controlling the duty cycle of the DC-DC converter.
2.2 Solar Cell Model
The electrical characteristics of a solar cell can be represented using an equivalent circuit model, comprising a photogenerated current source (Iph), a diode, and series and parallel resistances (Rs and Rp, respectively).
The output current (I0) can be expressed as:
I0=Iph−Id−Ip=Iph−Irs(enVthV0+I0Rs−1)−RpV0+I0Rs
where Irs is the diode saturation current, Vth is the thermal voltage, and n is the ideality factor.
2.3 DC-DC Converter Model
The Boost converter is commonly used as the DC-DC converter in solar systems due to its simplicity and high efficiency. Its circuit diagram, where Vpv is the input voltage from the PV array, Vb is the battery voltage, L is the inductor, and C0 is the output capacitor.
The state equations for the Boost converter under continuous conduction mode (CCM) are:
fracdVpvdt=C1Ipv−IL(Switch ON, Diode OFF)
fracdVpvdt=C1Ipv−IL(Switch OFF, Diode ON)
fracdILdt=LVpv(Switch ON, Diode OFF)
fracdILdt=LVpv−Vb(Switch OFF, Diode ON)
3. ACPI-Based MPPT Controller Design
3.1 System Decomposition
To simplify the control design, the solar system is decomposed into an outer voltage control loop and an inner current control loop. The outer loop generates a reference current (I*L) for the inner loop, which then adjusts the duty cycle of the DC-DC converter to track this reference.
3.2 Outer Voltage Controller Design
The outer voltage controller aims to minimize the error between the reference voltage (Vref) and the actual PV array voltage (Vpv). The ACPI controller for the outer loop is designed as follows:
u1p=2z1ce11
u1i=z21c∫e11dt
where e11=Vref−Vpv is the tracking error, z1c and z21c are speed factors, and u1p and u1i are the proportional and integral components, respectively. The virtual current reference (I*L) is then given by:
IL∗=u1p+u1i
3.3 Inner Current Controller Design
The inner current controller regulates the inductor current (IL) to track the reference current (I*L) generated by the outer loop. The ACPI controller for the inner loop is designed similarly:
u2p=2z2ce21
u2i=z22c∫e21dt
where e21=IL∗−IL is the tracking error, z2c and z22c are speed factors, and the duty cycle (u) of the DC-DC converter is controlled as:
u=b2z2ce20+2z2ce21
with b2=−LVb.
3.4 Controller Analysis
The stability and robustness of the ACPI control system are analyzed using theorems based on the Laplace transform and control theory. It is shown that the proposed controllers are robust to disturbances and have fast response times, ensuring effective tracking of the MPP under varying environmental conditions.
4. Simulation Results and Comparative Analysis
To evaluate the performance of the proposed ACPI-based MPPT strategy, simulation studies are conducted under different environmental conditions using MATLAB/Simulink. The results are compared with conventional MPPT methods, including P&O, INC, and Surface Fitting-based Backstepping Sliding Mode Control (SFBSMC).
4.1 Standard Temperature with Irradiance Jumps
Under standard temperature conditions (25°C), the irradiance is varied abruptly at different time instances. The power output from the solar system using different MPPT methods.
The results indicate that the ACPI-based controller exhibits minimal steady-state power fluctuations (0.002%) and fast recovery times (0.4 ms) compared to other methods.
4.2 Gradual Changes in Irradiance and Temperature
Simulations are also performed under gradual changes in irradiance and temperature to evaluate the robustness of the controllers.
The ACPI-based controller consistently outperforms other methods, demonstrating its effectiveness under dynamic operating conditions.
4.3 Comparative Summary
Table 1 summarizes the key performance indicators for different MPPT methods under varying environmental conditions.
| MPPT Method | Steady-State Power Fluctuation (%) | Recovery Time (ms) |
|---|---|---|
| P&O | 15.300 | 0.2 × 10³ |
| INC | 4.100 | 0.2 × 10³ |
| SFBSMC | 0.020 | 1.0 |
| ACPI | 0.002 | 0.4 |
Table 1: Comparative performance summary
5. Conclusion
This paper presents an in-depth analysis of an ACPI-based MPPT strategy for solar systems. The proposed controller exhibits superior performance in terms of response time, steady-state accuracy, and robustness under varying environmental conditions. Compared to conventional MPPT methods, the ACPI-based approach achieves minimal steady-state power fluctuations and fast recovery times, making it well-suited for dynamic operating scenarios. The simulation results validate the effectiveness of the proposed strategy, demonstrating its potential for widespread adoption in solar systems.